Controlador Principal: MCU AVR
Sensor: Sensor MEMS de 3 ejes
Rango de Escala del Giroscopio: 2000 dps
Tamaño: 43 x 27 x 14mm
Características:
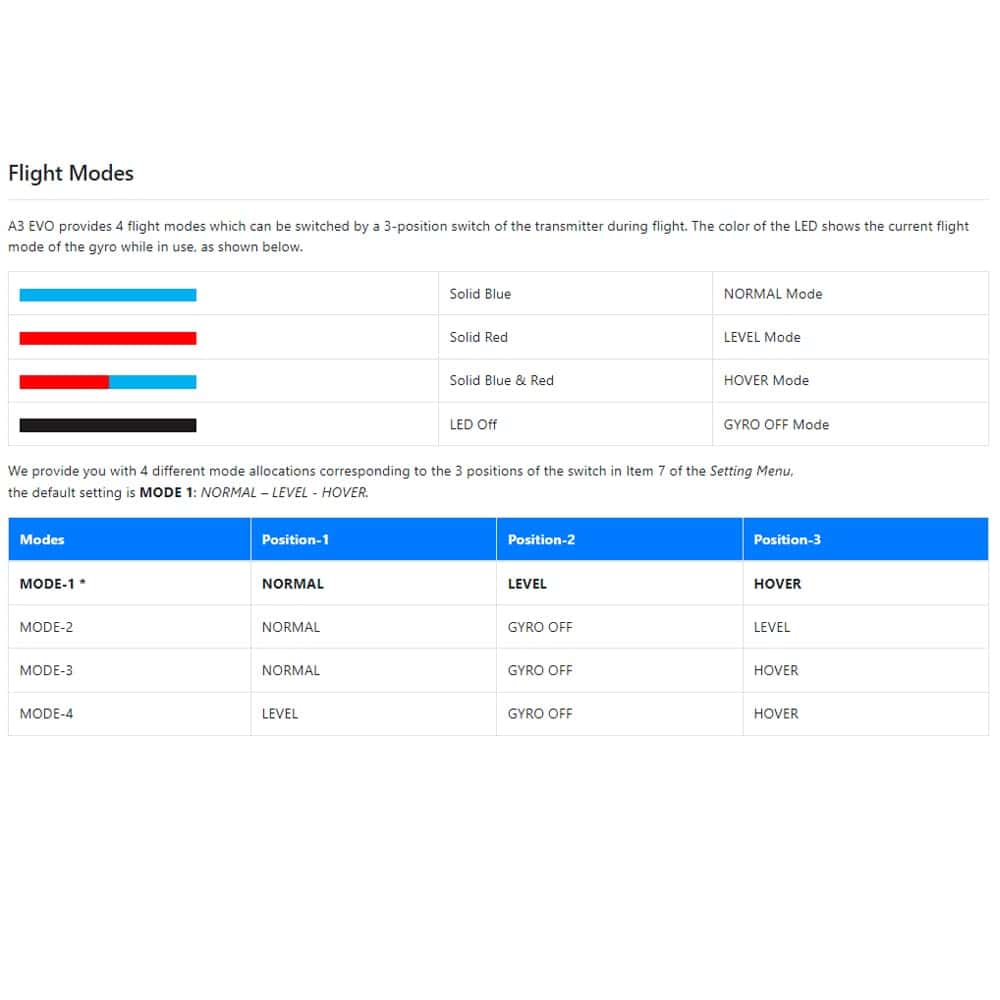
4 Modos de Vuelo: Modo GYRO OFF, Modo NORMAL, Modo LEVEL y Modo HOVER.
3 Tipos de Alas: Estándar, Ala Delta y V-Tail.
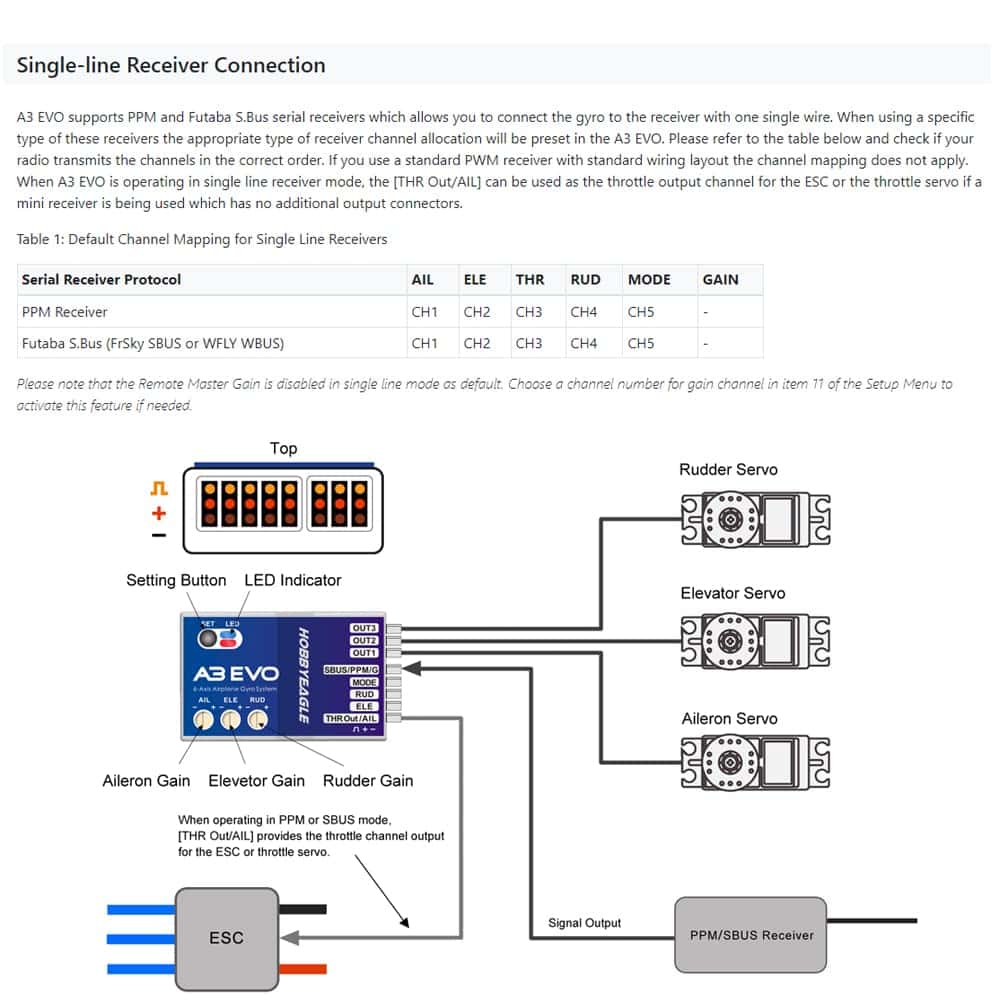
Soporta receptores PWM estándar, PPM y Futaba S.Bus. Canal de salida de acelerador proporcionado al usar el modo PPM o S.Bus.
Ajuste básico separado para Alerón, Elevador y Timón.
Soporte de ganancia maestra remota.
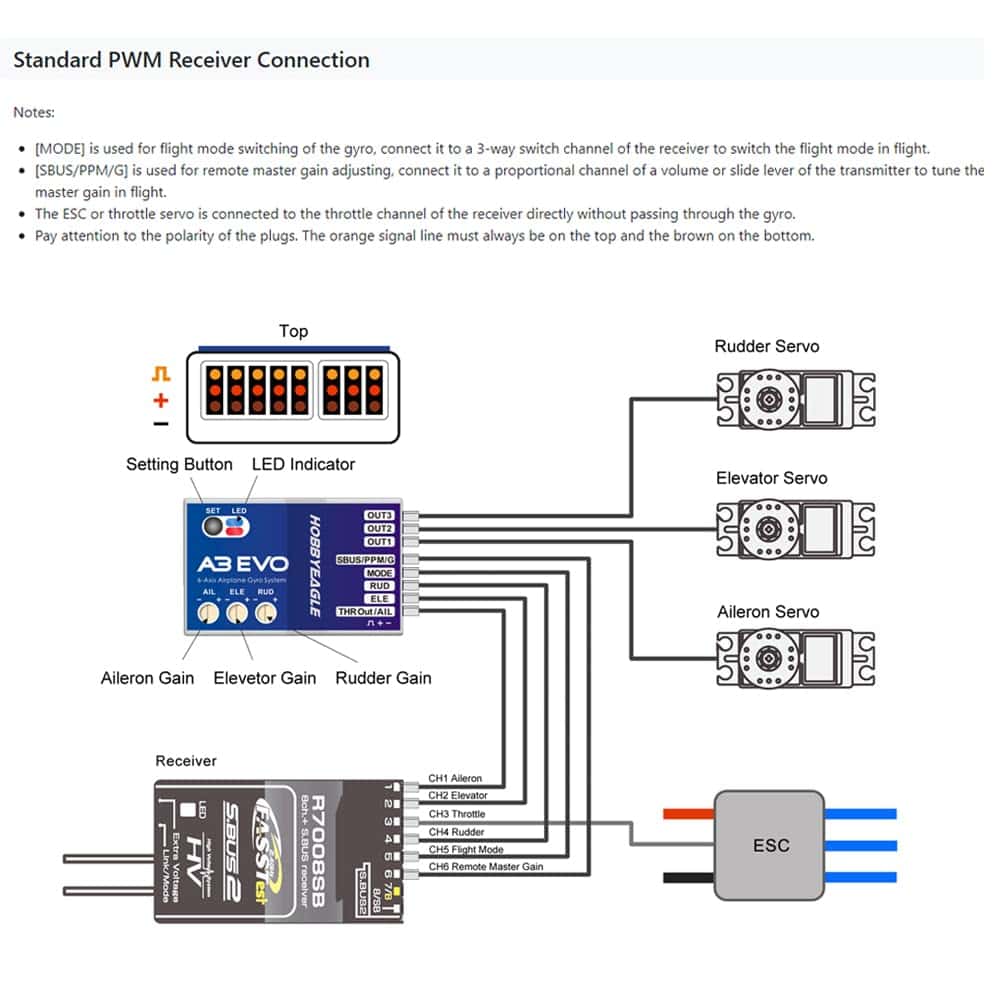
Conexión Estándar del Receptor PWM
Notas:
El MODE se utiliza para el cambio de modo de vuelo del giroscopio, conéctelo a un canal de interruptor de 3 vías del receptor para cambiar el modo de vuelo en vuelo. SBUS/PPM/G se utiliza para ajustar la ganancia maestra remota, conéctelo a un canal proporcional de un botón de volumen o palanca deslizante del transmisor para ajustar la ganancia maestra en vuelo.
El ESC o servo de acelerador se conecta directamente al canal de acelerador del receptor sin pasar por el giroscopio.
Preste atención a la polaridad de los enchufes. La línea de señal naranja debe estar siempre en la parte superior y la marrón en la parte inferior.