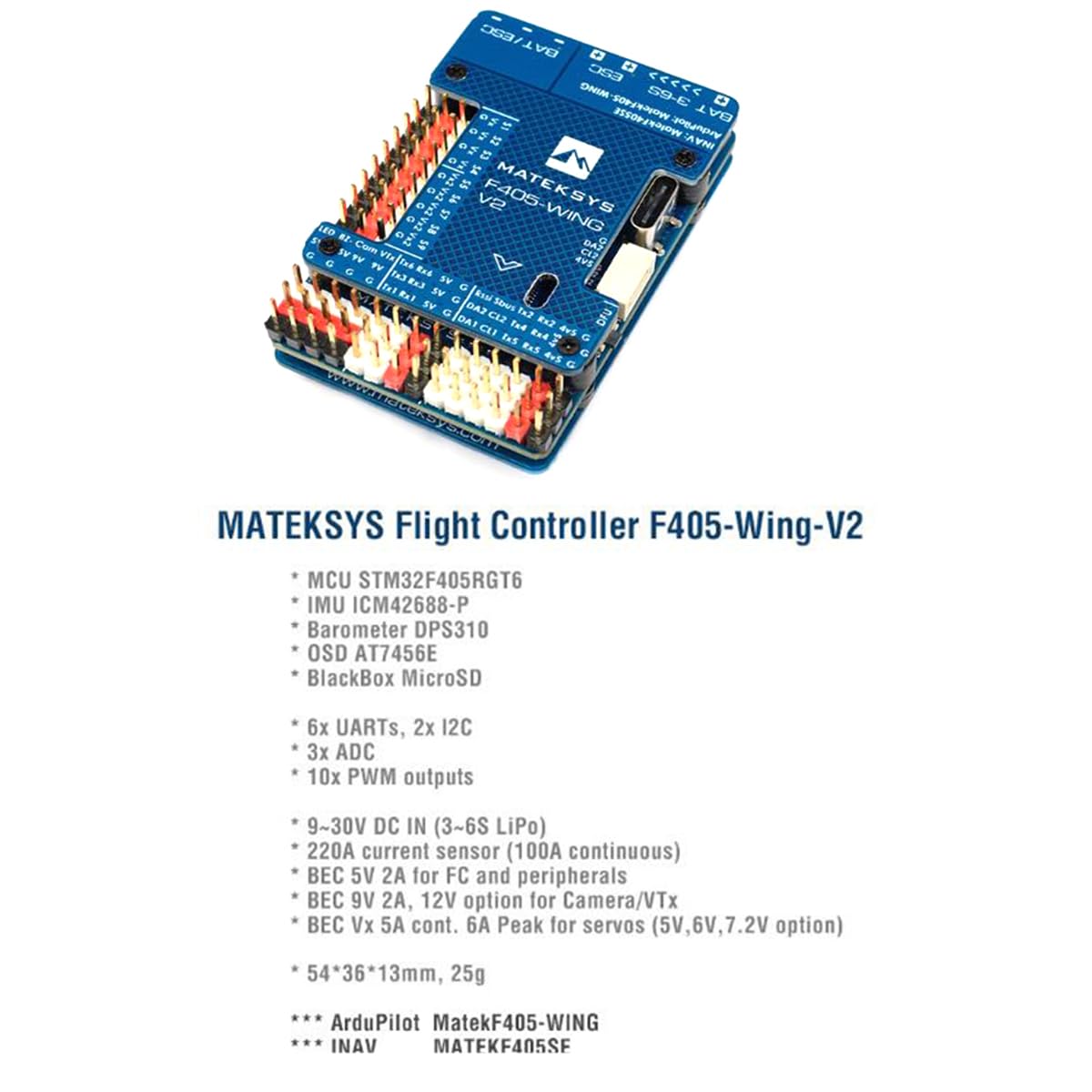
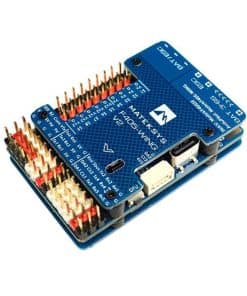
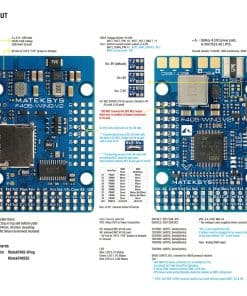
Especificaciones del FC
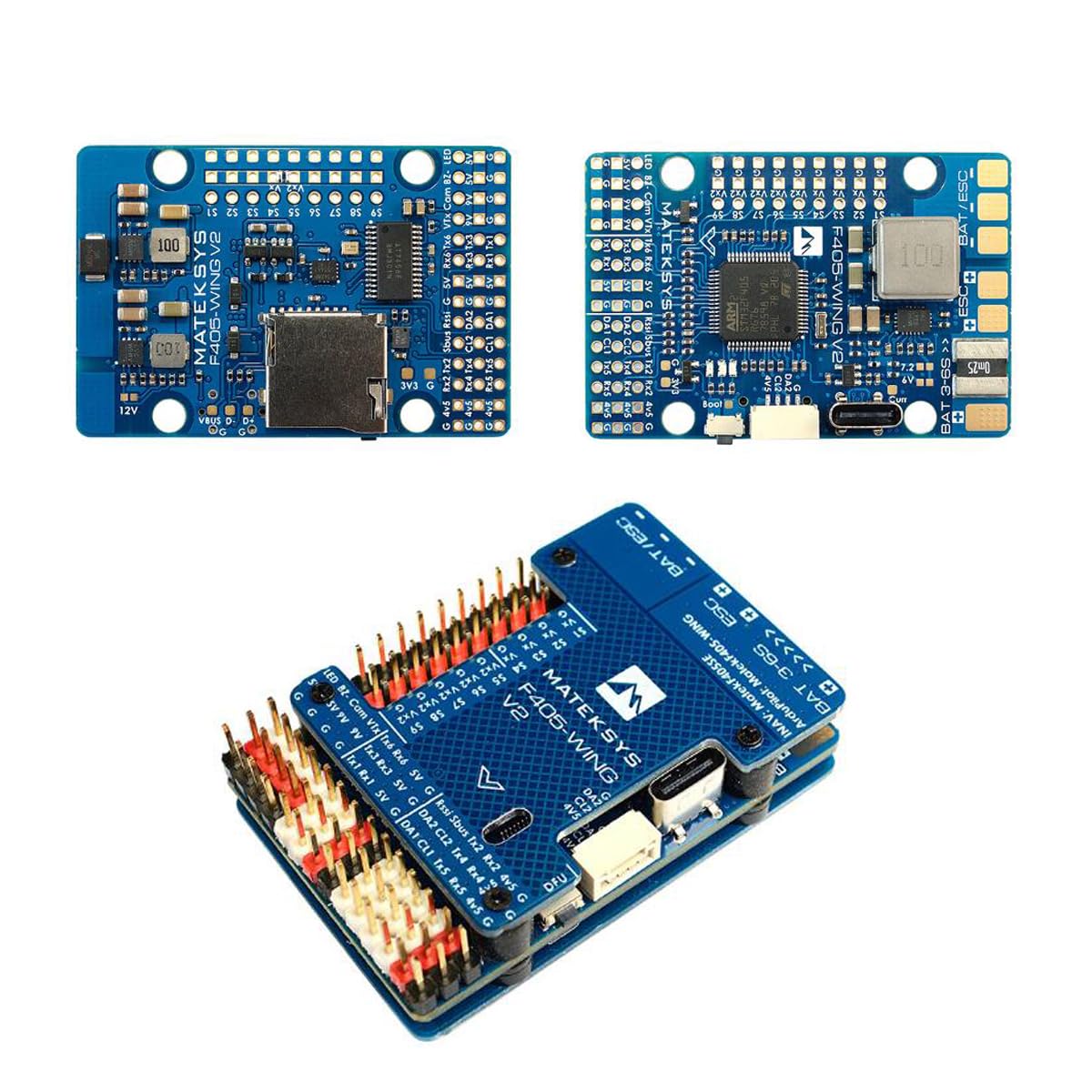
MCU: STM32F405 168MHz
IMU: acelerómetro/gyro MPU6000 (SPI)
Baro: BMP280 (I2C)
OSD: OSD INAV con chip AT7456E
Blackbox: Ranura para tarjeta MicroSD (SD/SDHC)
VCP y 6x UARTs
2x Motores, 7x Salidas para servos, 2x I2C
3x LEDs para estado del FC (Azul, Rojo) e indicador 3.3V (Rojo)
Inversor incorporado para entrada SBUS (UART2-RX)
PPM/UART Compartidos: UART2-RX
SoftSerial en la almohadilla TX2
Sensor de voltaje de batería: 1:10 (Escala 1100)
Tira LED WS2812: Sí
Zumbador: Sí
RSSI: Sí
Firmware FC
Vuelo INAV
Destino: MATEKF405SE
PDB
Rango de voltaje de entrada: 9~30V (LiPo de 3~6S) con protección TVS 2x Pads de potencia para ESC
Sensor de corriente: 104A, 3.3V ADC, Escala 317
Salida BEC 5V
Diseñado para controlador de vuelo, receptor, OSD, cámara, zumbador, tira LED 2812, zumbador, módulo GPS, AirSpeed
Corriente continua: 2 Amperios, Máx. 3A
Salida BEC 9V / 12V
Diseñado para transmisor de video, cámara, cardán, etc.
Corriente continua: 2 Amperios, Máx. 3A
Opción de 12V con almohadilla de puente
Salida BEC Vx
Diseñado para servos
Voltaje ajustable, 5V por defecto, 6V o 7.2V mediante puente
Corriente continua: 5 Amperios, Máx. 6A
Ondulación de salida: 50mV (VIn 24V, VOut 5V con carga de 5A)
Salida BEC 3.3V
Diseñado para módulo Baro / Compass y RX Spektrum
Regulador lineal
Corriente continua: 500mA
Montaje físico: 30.5 x 30.5mm, 4mm con gomas 3mm
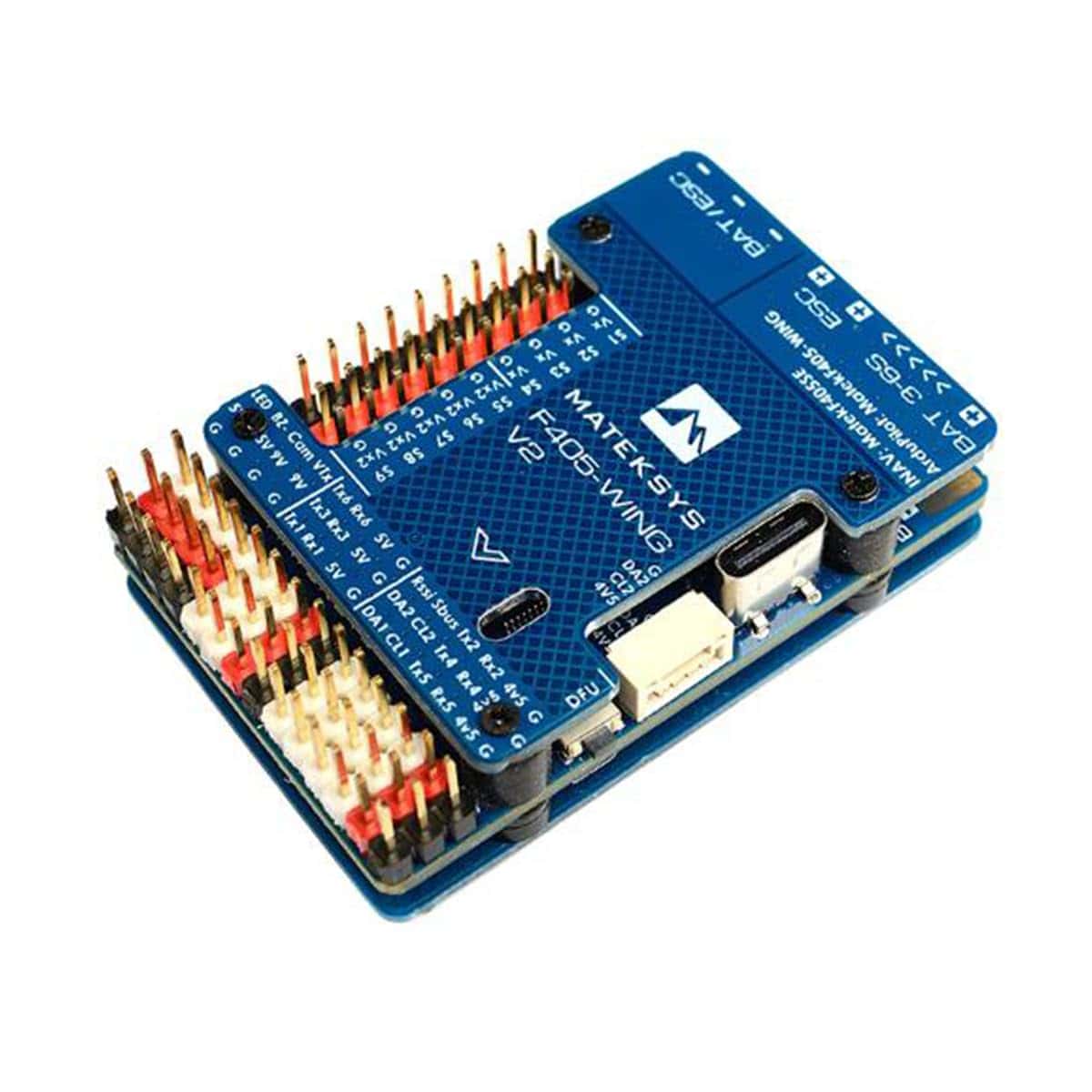
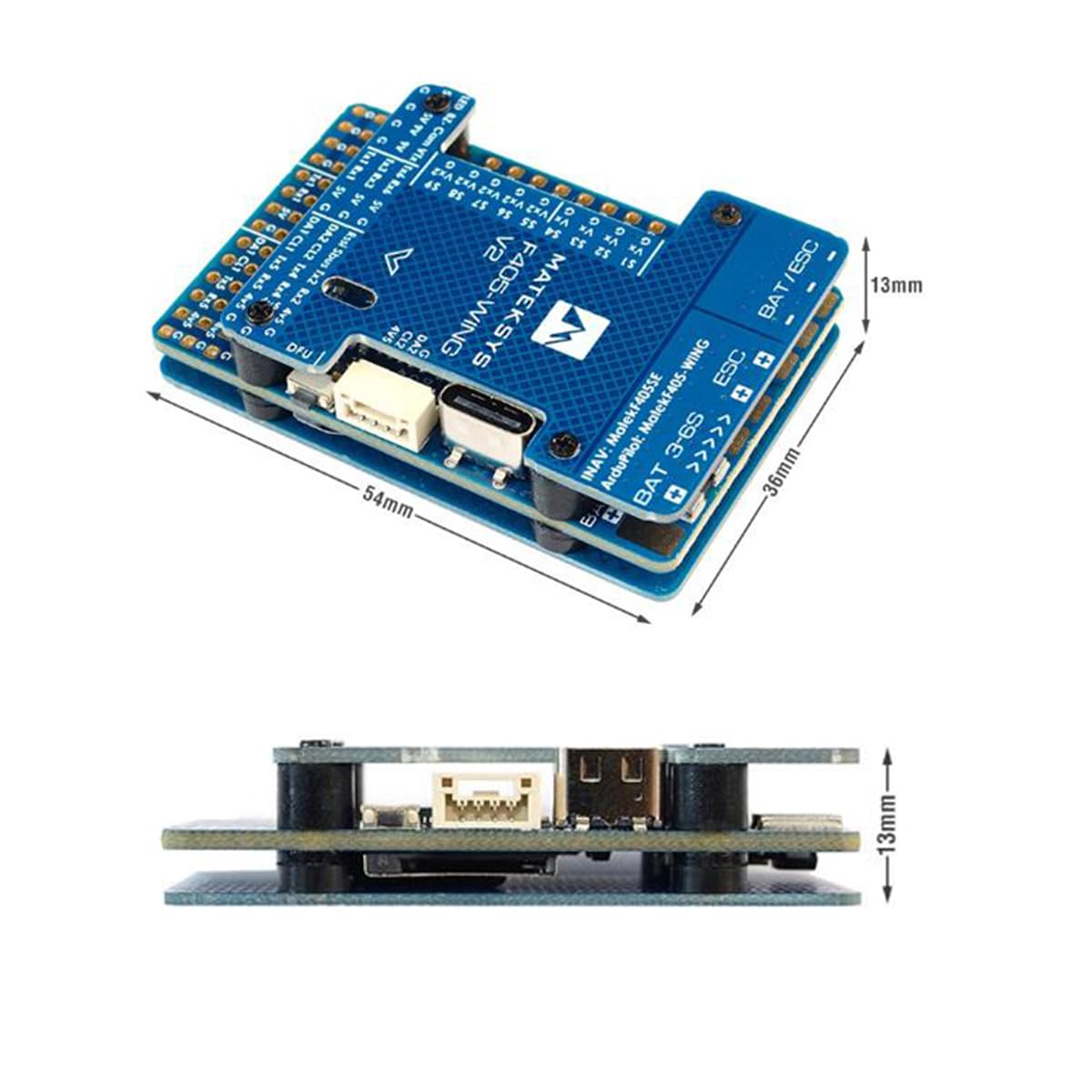
Dimensiones: 56 x 36 x 13 mm
Peso: 25g